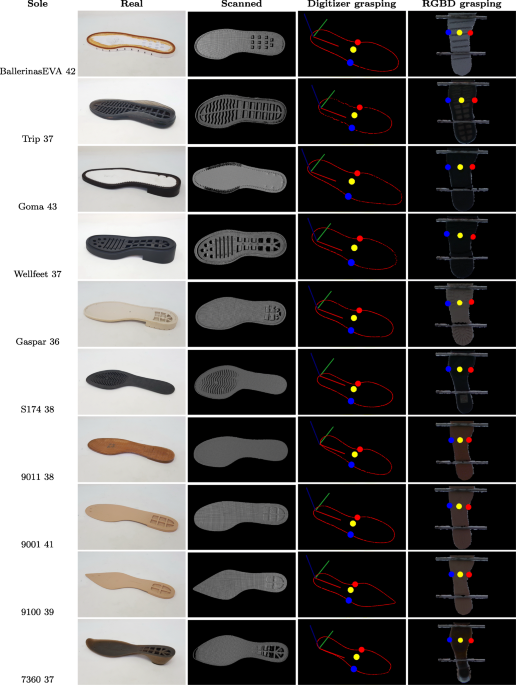
Towards footwear manufacturing 4.0: shoe sole robotic grasping in assembling operations
4.6
(305)
Write Review
More
$ 19.00
In stock
Description

Robotic Shoe Production Line, Integrated Automatic Shoemaking

Towards footwear manufacturing 4.0: shoe sole robotic grasping in

Figure 8 from A virtual try-on system in augmented reality using

Machines, Free Full-Text

Coordinate system: a Coordinates of world and cameras and b world
The scanning device mounted on the flange plate of the robot.

Designing the Intermediate Section between the Toe Part and the Back

Marking key points on the shoe groove by hand.

Stance and foot strike pattern: FFS (A), MFS (B), RFS (C). Figura 2.

Figure 8 from A virtual try-on system in augmented reality using

Full article: Automation of product packaging for industrial

Towards footwear manufacturing 4.0: shoe sole robotic grasping in

Machines, Free Full-Text





You may also like