Minimum cube volume of two grippers performing a knot-tying task
CONSTRAINT-BASED ROBOT KNOT TYING
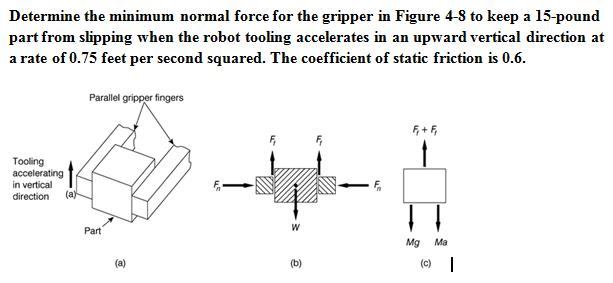
Solved Determine the minimum normal force for the gripper in
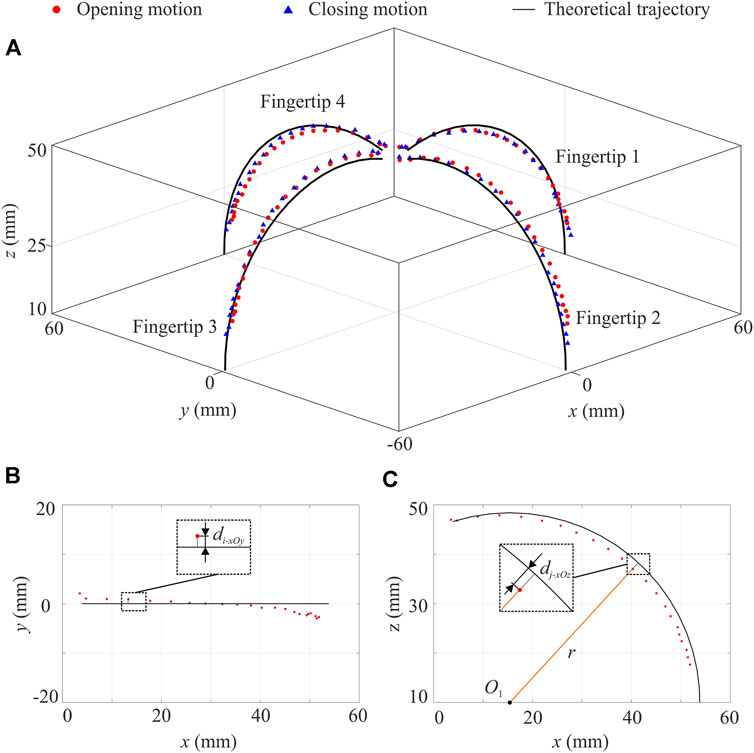
Frontiers A 3D-Printable Robotic Gripper Based on Thick Panel Origami
Learning-based cable coupling effect modeling for robotic manipulation of heavy industrial cables

Master–slave robotic platform and its feasibility study for micro‐neurosurgery - Mitsuishi - 2013 - The International Journal of Medical Robotics and Computer Assisted Surgery - Wiley Online Library
PDF) Trajectory Optimization of Robotic Suturing
Steerable extendable devices Patent Grant Cohen , et al. May 18, 2 [Southern Methodist University]

PDF) Trajectory Optimization of Robotic Suturing

Reinforcement learning in robotics: A survey - Jens Kober, J. Andrew Bagnell, Jan Peters, 2013

Robotics, Free Full-Text

Wyatt NEWMAN, Professor, Ph.D. M.I.T.

Master–slave robotic platform and its feasibility study for micro‐neurosurgery - Mitsuishi - 2013 - The International Journal of Medical Robotics and Computer Assisted Surgery - Wiley Online Library